
[Kotlin] 동시성 문제와 해결방법
소프트웨어를 개발하는 데 있어서, 성능을 높이기 위해 가장 흔하게 사용할 수 있는 방법은 병렬로 실행하는 것 입니다. 병렬 실행은 하드웨어의 특성을 이용하여 성능을 높이는 가장 좋은 방법이지만, 병렬로 하나의 프로세스 내의 여러 스레드에서 같은 데이터를 접근하여 읽고 쓰는 과정이 수행될 때, 데이터에 대한 일관성을 지키지 못하는 문제가 발생하게 됩니다. (다른말로 무결성 을 위배한다고 말합니다.)
멀티 코어 환경에서 멀티 스레딩을 수행할 때, 데이터에 대한 무결성을 지키는 것은 매우 중요합니다. 이것은 소프트웨어를 사용하는 사용자에게 데이터에 대한 신뢰성을 보장하지 못하여 사용자 경험이 떨어지는 문제를 초래할 수 있기 때문입니다.
운영체제, 데이터베이스의 트랜잭션 등 의 CS 교과목에서 저는 이미 이와 관련한 내용들을 충분히 학습했었습니다. 하지만, Java 기반의 Kotlin 언어로 구현하는 안드로이드 앱에서 이를 실질적으로 해결하는 방법들에 대해서는 미숙했었습니다.
이번 포스팅에서는 멀티 코어 환경에서 멀티 스레딩을 할 때, 구체적으로 어떤 문제들이, 어떻게 발생할 수 있고, 코드 수준에서 이를 어떻게 해결할 수 있는지 의 방법들에 대해 정리해보고자 합니다.
병렬 처리
현대 PC 의 CPU 는 물리적으로 여러개의 코어가 있는 멀티 코어 프로세서 입니다. 물리적으로 나뉘어진 멀티 코어 내에서 여러개의 프로세스의 실행 흐름인 Thread 를 실행할 수 있습니다. 이 Thread 는 OS 에 의해 관리되는 논리적 단위의 자원이며, 언어적 수준에서 OS 가 관리하는 Thread 를 생성 및 실행할 수 있습니다. 자바와 같은 VM 이 필요한 언어는 VM 이 직접 OS 의 스레드를 call 하고, 언어 수준에서는 VM 의 스레드에 접근합니다. 그외에 Cpp 와 같은 언어에서는 CPU 위에서 바로 읽혀질 수 있는 Machinary Code 로 컴파일되기 때문에 Cpp runtime 이 직접 OS 의 스레드를 call 할 수 있습니다.
중요한 것은 멀티 코어 프로세서에서 여러개의 스레드를 병렬적으로 동시에 실행할 때, 메인 메모리로 부터 항상 값을 읽어들여 CPU 의 레지스터에 올리는 것은 느리기 때문에 최적화를 수행해야 한다는 것입니다. 이 때, 사용하는 것이 Cache Memory 입니다.
Cache Memory
캐시 메모리는 ‘한번 참조된 메모리 주소 그리고 그 근처의 주소들은 빠른 시간 이내에 다시 참조될 가능성이 높다’ 라는 참조 지역성의 원리에 따라, 병목을 줄이기 위해 메인 메모리에서 읽은 페이지를 캐싱 해두는 공간 입니다.
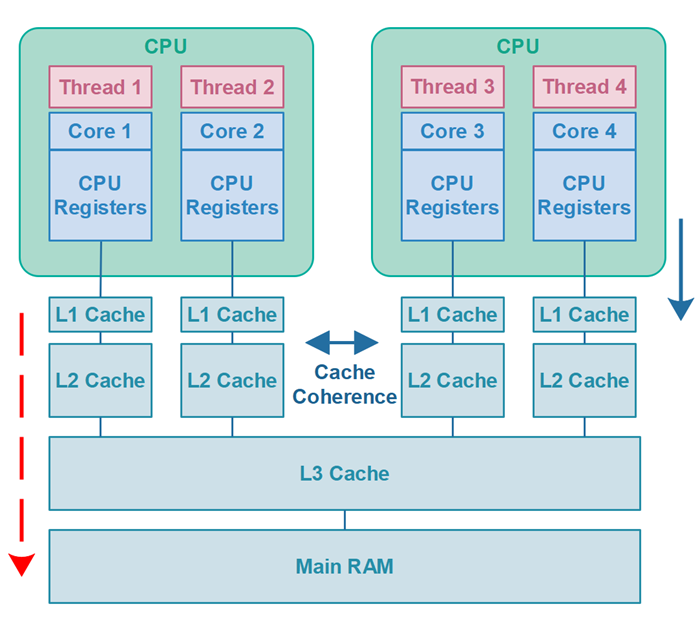
캐시 메모리는 CPU 에 포함되며, 메인 메모리보다 물리적인 위치가 가깝기 때문에, 훨씬 빠른 접근 속도를 보장할 수 있습니다. CPU 아키텍처에 따라 다르지만 CPU 코어 마다 별도로 갖거나, 하나의 캐시를 공유하여 사용할 수 있습니다. 보통 L1, L2 캐시는 코어 마다 별도로 가지며, L3 캐시는 한개를 공유하여 사용합니다.
물론, CPU 에서는 캐시 메모리 만을 최적화 수단으로써 사용하는건 아닙니다. 만약, CPU 내부의 레지스터들에서 현재 명령어 실행 과정에 이미 읽었던 값을 그대로 사용할 수 있다면, 이를 재사용하도록 최적화 하기도 합니다. 여기서 조금만 더 깊이 생각해 봅시다. CPU 는 명령어를 어떻게 실행할까요?
CPU Instruction Pipelining
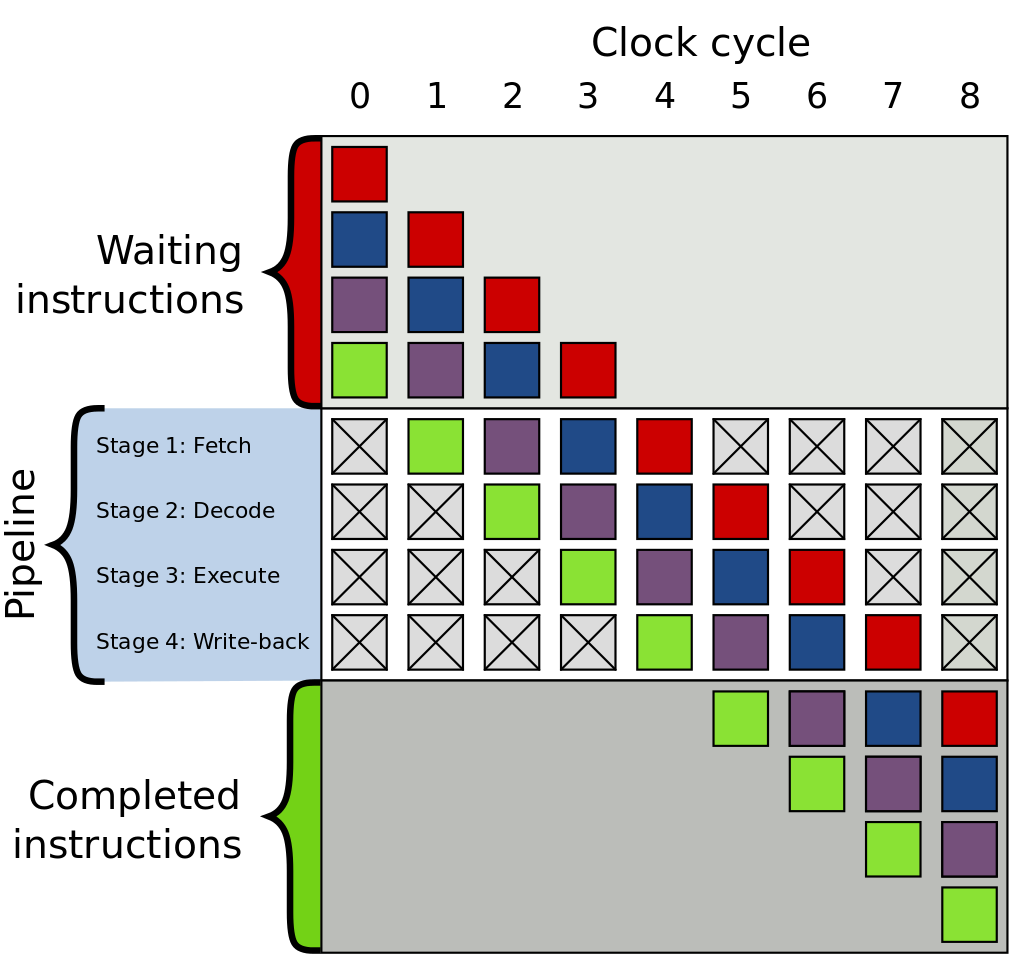
답은 이미 ‘컴퓨터 시스템 구조’ 시간에 배웠던 내용입니다. 명령어 하나를 CPU 에서 처리하기 위해서 1. 명령어를 읽어들이고(Fetch), 2. 이를 해석하고(Decode), 3. 해석된 명령어를 실행하고(Execute), 4. 마지막으로 실행된 결과를 저장(Write-back)해야 합니다. 이 조차도 CPU 는 단순히 각 명령어를 하나씩 순차적으로 실행하지 않습니다. 명령어 처리 사이클을 병렬 Pipeline 으로 구조화하여 실행함으로써 최적화 합니다.
즉, Fetch - Decode - Execute - Write 단계들을 병렬 파이프라인으로 구조화 한 뒤에, 각각의 명령어들을 한 사이클에서 동시에 수행하게 됩니다.
위 구조에 따라 순차적으로 명령어들을 병렬로 실행한다면, 한가지 문제가 발생합니다. 명령어 마다 실행에 걸리는 시간이 모두 다른데, 만약 앞쪽 명령어를 처리하는데 시간이 오래 소요된다면, 나머지 명령어를 처리하는데 까지 병목을 야기한다는 문제가 발생하게 됩니다. 그렇기 때문에, 컴파일러가 코드를 compile 하는 과정에서 메모리 재배치로 최적화 하는 과정을 거치게 됩니다.
메모리 재배치
가령, 다음과 같은 코드가 있다고 생각해 봅시다.
val data: Int
val flag: Boolean
fun test() {
data = 100
flag = true
}
코드는 위와 같이 data 에 100을 할당한 후에 flag 를 true 로 만들지만, 실제로 어셈블리 수준에서는 컴파일러가 명령어 처리에 걸리는 시간에 따라 코드를 최적화 하는 과정에서 다음과 같이 메모리 재배치가 일어날 수 있습니다.
val data: Int
val flag: Boolean
fun test() {
flag = true
data = 100
}
위 처럼 메모리 재배치가 일어나는 경우에는 멀티 스레드 환경에서 두 스레드가 순차적으로 실행되더라도 문제가 발생할 수 있습니다. 당연히 싱글 스레드는 문제가 없겠지만, 순차적으로 실행되는 멀티스레드 환경인데도 문제가 발생한다는 점에서 다소 의아하실 수도 있을 것 같습니다. 하지만, 좀 더 깊이 생각해보면 앞서 언급한 바와 같이 참조 지역성의 원리에 따라 최적화 되기 때문에 각 스레드의 변경 사항이 아직 메인 메모리로 적용이 되지 않았거나, 또는 각 CPU 코어가 참조했던 메모리 주소를 다시 읽지 않고 그대로 재 사용할 수 있기 때문에 두 스레드 스택이 관찰하고 있는 자원이 동일함을 보장할 수 없습니다. 후술하겠지만, 이러한 문제를 가시성 문제라고 합니다.
하드웨어 구조 상의 병목을 완화하기 위한 최적화가 여러가지 복잡한 매커니즘들을 결합하고 있기 때문에 결과적으로 멀티 스레딩을 하게 된다면 실제로 코드의 실행 결과가 어떻게 될지 장담할 수 없습니다. 다만, 최적화를 실행한 결과는 항상 같음을 보장하기 때문에 최적화가 되었다 하더라도 싱글 스레드에서는 그 문제가 가시화 되지 않습니다. 하지만, 멀티 스레딩 에서는 다릅니다. 동시에 여러 스레드에서 공유 자원에 접근하는 경우, Race Condition(경쟁 상태) 로 인해 앞서 언급한 가시성 문제와 수행 결과가 항상 달라지는 일관성을 만족하지 못하는 문제가 발생합니다. 결과적으로, 컴파일러는 자체적으로 가장 좋은 퍼포먼스를 위한 코드로 변환하며, 항상 함수의 실행 결과는 동일함을 보장합니다.
따라서, 개발자는 여러 스레드가 공유 자원에 접근해야 할 때, 각 스레드를 원자적으로 실행시킬 수 있다면, 멀티 스레딩에서의 Race Condition(경쟁상태) 를 예방할 수 있습니다.
Race Condition
동시에 여러 스레드에서 동일한 데이터에 접근하여 읽기 만 수행할 경우 문제가 발생하지는 않습니다. 데이터의 변화가 없는 상태에서 읽었기 때문에 동일한 데이터의 결과를 얻었을 것입니다. 이렇게 특정 작업을 수행했을 때 예측되는 결과가 나오는 경우 일관성 을 보장하고 “데이터가 무결하다”는 의미로 무결성 을 만족한다고 합니다.
하지만, 읽기 와 쓰기 를 동시에 수행하는 경우는 말이 달라집니다.(순서 의존성이 있는 두 읽기를 제외하고 설명합니다.) 누가 먼저 데이터를 읽고, 쓰기를 수행했느냐 에 따라 그 결과가 달라지게 됩니다. 이렇게 결과를 예측할 수 없는(일관성을 보장할 수 없는) 경우를 Race Condition 이라고 부릅니다.
Race Condition 은 “경쟁 상태” 라는 뜻입니다. 두개 이상의 스레드나 프로세스가 서로 공유 자원에 접근하기 위해 경쟁하여 누가 먼저 수행되었느냐에 따라 그 결과가 항상 달라지고 일관성을 보장할 수 없는 문제를 통칭합니다. 보통 이러한 경우 병렬 실행되는 스레드들의 접근을 제한하여 순차적으로 실행하여 동기화 합니다. 현대 프로그래밍에서는 상호 배제 를 통해, 이를 실현합니다. 이 방법은 특정 작업을 실행하는 스레드나 프로세스들을 순차적으로 처리하여 그 결과를 예측 가능하게 만들어 주지만, 병렬 실행의 목적이었던 성능 개선의 이점을 잃어버리게 됩니다.
상호 배제(Mutual Exclusion)
상호 배제는 공유 자원에 대해 lock 과 unlock 을 통해, 접근 가능한 스레드를 제한함으로써 동시성에 대한 문제를 해결하는 방법을 말합니다. 이는 멀티 스레드나 멀티 코어 환경에서 공유 자원에 대해 동시 접근을 제한하고, 순차적으로 접근하도록 만듭니다. 이때, 공유 자원에 대한 영역을 임계 영역 이라고 부릅니다.
lock 은 스레드가 임계 영역에 접근하여 더 이상 다른 스레드가 접근하지 못하도록 점유하기 위한 방법이며, unlock 은 임계 영역을 점유했던 스레드가 자신의 작업을 모두 마치고 공유 자원에 대한 점유를 해제하여 다른 스레드가 접근 가능하도록 만드는 것 입니다.
Mutex
상호 배제는 영어로 Mutual Exclusion 이라고 부르며, 이를 줄여 Mutex 라고 부릅니다. 코틀린에서 상호 배제를 사용하여 가장 간단하게 동기화 할 수 있는 방법은 Mutex 클래스를 생성하고 lock(), unlock(), withLock() 메소드를 이용하는 것입니다.
fun main() {
val mutex = Mutex()
var x: Int = 0
CoroutineScope.launch {
repeat(100) {
mutex.lock()
x++
mutex.unlock()
}
}
println(x)
}
위 예시처럼 mutex.lock() 과 unlock() 사이에 존재하는 연산들에 대해 동기화를 실행하는 코드를 작성할 수 있습니다. 하지만 이 방법은 lock() 과 unlock() 사이에서 예외가 발생하는 경우 unlock() 이 호출되지 않는 문제를 초래할 수 있는 안전하지 못한 방법입니다. 이를 대비하여 withLock() 을 사용하는 것이 바람직합니다.
fun main() {
val mutex = Mutex(Any)
var x: Int = 0
CoroutineScope.launch {
repeat(100) {
mutex.withLock {
x++
}
}
}
println(x)
}
withLock() 은 중단함수이며, 코루틴과 호환되는 함수입니다. 이는 내부적으로 finally 블록을 통해 mutex 의 unlock() 을 호출해 주기 때문에 예외 상황에서도 unlock() 이 호출되는 것을 보장해줍니다.
상호 배제를 이용하면 동시성에 대한 문제를 해결할 수 있습니다. 하지만, 특정 상황에서 추가적인 문제가 발생할 수 있습니다.
Dead Lock
만약, A 스레드가 A1 임계 영역을 점유하고 있고, B 스레드가 B1 임계 영역을 점유하고 있다고 가정해 봅시다. 이 때, A 스레드가 B1 임계 영역에 접근하기 위해 B가 unlock 하기를 기다리고 있고, B 스레드는 A1 임계 영역에 접근하기 위해 A 가 unlock 하기를 서로 기다리고 있는 상황이라면, 서로 영원히 서로의 자원을 내놓기를 기다려 Blocking 되어 버리는 상황이 발생할 수 있습니다. 이런 상황을 교착 상태(DeadLock) 라고 부릅니다.
구체적으로 Mutex 로 lock 을 획득한 상태에서 다시 lock 을 획득하려는 경우에서도 Dead Lock 이 발생할 수 있습니다.
fun main() {
val mutex = Mutex(Any)
var x: Int = 0
CoroutineScope.launch {
repeat(100) {
mutex.withLock { // 1
mutex.withLock { // 2
x++
}
}
}
}
println(x)
}
이는 lock() 을 통해 임계 영역을 점유한 상태에서 한번더 lock() 을 호출하면, 2번째 lock() 호출은 1번째의 unlock() 이 호출될 때 까지 대기하지만 1번째의 unlock() 은 2번째가 BLOCKED 상태로 lock 을 획득하기 위해 대기되면서 영원히 호출될 수 없기 때문에 Dead Lock 이 발생합니다. 자바에서는 Dead Lock 에 Safe 하도록 구현되지 않기 때문에 보통 Dead Lock 이 발생할 조건들을 만족하지 않게 구현하거나, 이러한 상황을 회피하도록 미리 만들어진 클래스들을 이용하는 것이 좋습니다.(이에 대한 구체적 예시나 조건들은 나무위키 와 자바 레퍼런스 를 참고하시면 되겠습니다.)
Mutual Exclusion 은 임계 영역에 대한 lock 과 unlock 을 통해 동시 접근을 막는 추상적 개념 입니다.(위 클래스는 후술하는 Java 의 Monitor 를 활용하는 세마포어를 이용합니다.) 이를 실질적으로 소프트웨어로 구현하는 방법들에는 데커, 피터슨 알고리즘이 있었습니다. 하지만 이들에는 Busy waiting 과 같은 문제들이 있었고, 이를 해결하여 소프트웨어로 구현한 방법이 세마포어 알고리즘 입니다.
세마포어
기존의 알고리즘에서는 현재 스레드가 임계 영역을 다른 스레드가 점유하고 있는지 또는 없는지를 지속적으로 무한 반복문을 돌면서 확인하는 바쁜 대기(Busy waiting) 방법을 이용했습니다. 이 방법은 지속적 폴링을 실행하면서 CPU 자원을 낭비하게 되는 원인을 초래했습니다. 이 문제를 해결하기 위해 임계 영역에 접근하기 위해 대기하는 스레드들을 반복문으로 busy waiting 하지 않게 하고, 저장 공간에 넣어 대기 시켜 놓았다가 임계 영역에서 작업을 마치고 나오는 스레드가 대기 중인 스레드를 깨워주도록 만든 방법이 세마포어 알고리즘 입니다.
세마포어는 정수 타입의 조건 변수 S 를 가지며 P() 와 V() 연산을 통해 Mutex 를 구현합니다.
- P() 연산: S 의 값이 0 보다 큰지 확인하고, 0 보다 크다면 1감소 시킨 후 임계 영역에 진입한다. 그렇지 않다면, Wait Set (또는 Wait Queue) 에 들어가 대기한다.
- V() 연산: 임계 영역에 진입했던 스레드가 나오면서, S 의 값을 1 증가시킨다. 이때, Wait Set (또는 Wait Queue) 에 존재하는 스레드가 있으면 깨워줘 대기중인 스레드가 임계영역에 진입할 수 있도록 해준다.
- S: 임계 영역에 진입 가능한 스레드의 수를 세는 카운팅 변수 이다. 이 조건 상수를 통해 모든 스레드들이 협력할 수 있어 Busy waiting 을 하지 않아도 된다.
세마포어에는 2가지 종류로, 카운팅 변수를 2로 제한한 이진 세마포어 와 3 이상인 카운팅 세마포어 로 나뉩니다. 이진 세마포어의 경우 상호 협력으로 개선된 Mutex 로 치환될 수 있으며, 구체적 구현 방법이 적용된 사례가 됩니다. 카운팅 세마포어는 임계영역에 접근하는 스레드의 수를 제한하는 용도로 사용되기 때문에 그 자체로는 동시성 문제를 해결하지 못합니다.
자바에서는 이진 세마포어를 활용하여 더 고차원 적인 방법을 통해 동시성의 문제를 해결하기 위한 추상화된 전략을 제공하고 있습니다.
Monitor
기본적으로 자바는 Monitor 라는 객체를 통해 동시성에 대한 문제를 해결하기 위한 추상화된 매커니즘을 제공합니다. 자바에서 모든 객체는 모니터라는 객체를 별도로 가지고 있으며, 모니터를 기반으로 상호배제 와 협력 을 제공합니다.
모든 객체는 각각의 임계 영역인 모니터를 가지고, 스레드가 모니터 객체에 lock 과 unlock(상호 배제) 을 사용하여 임계 영역을 점유하거나 이양할 수 있습니다. 자바기반의 코틀린에서는 직접 lock 또는 unlock 메소드를 호출하지 않고, 내부적으로 모니터를 이용하여 추상화된 전략으로써 제공되는 synchronized 어노테이션이나 람다를 활용하여 동기화를 구현할 수 있습니다.
class Example(private var x: Int = 0) {
fun inc() {
synchronized(this) {
x++
}
}
}
여러 스레드에서 Example 클래스의 x 값을 증가시키는 함수 inc() 를 호출한다고 했을 때, 내부에서 synchronized 블럭으로 x 값을 증가시키는 코드를 감싸면 해당 코드의 실행을 모든 스레드들에 대해 동기화 해줍니다. 따라서 x 값을 증가시키는 연산에서 일관성이 보장될 수 있습니다.
synchronized 함수의 인자로 this(자기 자신의 참조 인스턴스) 를 전달하고 있는데, 내부적으로는 해당 인스턴스가 보유한 모니터를 이용합니다. 결과적으로 현재 스레드가 Example 인스턴스의 모니터 제어권을 획득하게 되고, 다른 스레드는 해당 객체의 제어권을 획득하기 위해 BLOCKED 상태로 Entry Set 에서 대기하게 됩니다.
또한, 자바의 모니터는 세마포어를 기반으로 동작하기 때문에 현재 스레드가 임계 영역의 점유권을 이양하기 위해 다른 스레드가 점유하도록 Entry Set 이나 Wait Set 에서 대기 중인 스레드를 깨울 수 있습니다. 이 과정에서 별도의 제어를 받지 않고 스레드들간에 모니터 객체의 wait(), notify(), notifyAll() 과 같은 메소드들을 이용하여 상호 협력 하는 방식으로 동작 합니다.
wait(), notify(), notifyAll()
기본적으로 자바의 스레드들은 우선 순위 스케줄링(우선순위가 같은 경우 FIFO)과 라운드 로빈 방식으로 동작하여, 특정 스레드가 임계 영역을 점유중인 상태에서 도중에 다른 스레드가 끼어들(interrupt) 수 있는 함수인 wait() 함수를 제공합니다. 이 함수를 사용하면 현재 모니터의 lock 을 획득한 스레드가 동작을 중단하고 Wait Set 에서 대기하며, Entry Set 에서 임계 영역의 lock 을 획득하기 위해 BLOCKED 상태로 대기중인 스레드 중 우선순위가 높은 스레드가 lock 을 획득하게 됩니다.
이후, 해당 스레드가 모든 작업을 마치고 notify() 메소드를 호출하면, 스레드가 종료되면서 Wait Set 에서 대기하던 가장 우선순위가 높은 스레드를 깨워 다시 모니터의 제어권을 획득하고 남은 작업을 이어서 처리할 수 있도록 합니다. 또한, wait() 의 오버로딩 함수로 timeout 시간을 파라미터로 전달하는 경우 다른 스레드가 notify 해주지 않아도 지정된 시간이 지나면 자동으로 깨어날 수 있으며, notifyAll() 을 호출할 경우 Wait Set 의 모든 스레드가 깨어나게 되고, 이들이 경쟁하여 모니터의 제어권을 획득하게 됩니다.
Entry Set 과 Wait Set
모니터를 점유하려고 시도한 경우 만약 점유중인 스레드가 있다면, 해당 스레드는 Entry Set 에서 BLOCKED 상태로 대기하게 됩니다. 그리고 모니터를 점유하는 스레드가 wait() 메소드를 호출하여 모니터의 제어권을 이양 하고자 한다면, 해당 스레드는 WAITING 상태로 Wait Set 에서 대기하게 되며, Entry Set 에서 대기하는 스레드 중 가장 우선순위가 높은 스레드를 깨워줍니다.
이후, 해당 스레드가 모든 작업을 마치면 notify() 혹은 notifyAll() 을 호출해야 하며, 호출한 경우 Wait Set 에서 대기중인 스레드 중 가장 우선순위가 높은 스레드를 깨워줍니다. 그리고 깨워진 스레드는 남은 본인의 작업을 다 마치고 다시 Entry Set 에서 대기중인 스레드 중 우선순위가 가장 높은 스레드를 깨워주는 방식으로 동작하게 됩니다.
이외에도 Thread.Sleep() 이나 join() 과 같은 메소드를 호출해도 마찬가지로 해당 스레드는 WAITING 상태가 되며 Wait Set 에 진입하게 됩니다.
Mutex 를 구현하는 방법들은 병렬 실행 이 아닌 순차 실행 으로 만들어 멀티 스레드나 프로세스의 성능 개선에 대한 이점을 잃게 만듭니다. 병렬 실행을 유지하면서 즉, Lock 과 Unlock 없이 “동기화를 만족할 수 있는 방법은 없을까?” 하고 고안된 방법이 락-프리(Lock-Free) 알고리즘 입니다.
Lock-Free 알고리즘
Lock 을 하지 않고 병렬 실행을 유지하면서 동기화를 할 수 있는 대표적인 방법으로 CAS(Compare And Swap) 가 있습니다. CAS 알고리즘은 원본 데이터를 캐싱하여 캐싱한 데이터의 복사본에 쓰기 연산을 수행하고, 복사본을 원본데이터에 적용할 때, 캐싱한 데이터와 원본 데이터를 비교하여 다른 경우 쓰기를 취소하고 재시도하는 알고리즘 입니다. 간단하게 이방법은 공유 자원에서 값을 스레드 스택에 복사하고, 연산을 수행한 뒤, 다시 공유자원에 적용하는 과정에 대해 원자성(Atomic) 을 보장하는 방법입니다.
구체적으로 동시성 환경에서 두개의 스레드는 각각 독립적인 스레드 스택을 보유할 것이고, 각 스레드 스택에 공유 자원을 복사한 뒤 복사본에 연산을 수행하고 나서 이 결과를 적용하기 전에 복사했던 원본과 공유자원을 비교하여 같았다면, 현재 스레드가 공유 자원에 연산을 수행하고 적용하기 까지의 과정에 다른 스레드가 끼어들지 않았다는 것을 확신하여 현재 스레드의 연산 결과를 공유 자원에 다시 적용해도 동시성 문제가 없음을 보장할 수 있습니다. 하지만, 달랐다면 중간에 다른 스레드가 공유 자원에 접근하여 데이터를 변경시켰기 때문에 동시성 문제가 발생할 수 있어 현재 스레드의 연산을 취소하고 처음부터 재시도 하게 됩니다.
이를 실제로 구현하여 언어 수준에서 제공되는 대표적 예시가 Java 의 Atomic 클래스 입니다.
Atomic
Atomic 은 Int, Double, Long 과 같은 특정 타입들에 대해 Lock-Free 알고리즘 중 하나인 CAS 를 이용하여 Non-Blocking 동기화를 지원해주는 클래스 입니다. 구체적 예시로 AtomicInteger 를 살펴보겠습니다.
public class AtomicInteger extends Number implements java.io.Serializable {
private volatile int value;
public final int get() {
return value;
}
public final void set(int newValue) {
value = newValue;
}
private static final VarHandle VALUE;
static {
try {
MethodHandles.Lookup l = MethodHandles.lookup();
VALUE = l.findVarHandle(AtomicInteger.class, "value", int.class);
} catch (ReflectiveOperationException e) {
throw new ExceptionInInitializerError(e);
}
}
public final boolean compareAndSet(int expectedValue, int newValue) {
return VALUE.compareAndSet(this, expectedValue, newValue);
}
}
AtomicInteger 클래스에 존재하는 VarHandle 타입의 value 변수에 원자적으로 접근하기 위한 멤버변수 입니다. value 는 private 하기 때문에 캡슐화 원칙에 따라 행위(메소드)에 의해서 값을 쓰거나 읽을 수 있습니다.
핵심은 compareAndSet() 함수가,
- value 를 가져와서
- value 를 newValue 로 업데이트
하는 두 단계를 원자적으로 수행시킨다는 겁니다.
즉, compareAndSet()(CAS 를 활용하면서, 리턴 결과가 boolean 인 함수) 실행중에 다른 스레드가 끼어들어 쓰기 연산을 수행할 수 없도록, 원자적으로 연산하기 위해 존재하는 VALUE.compareAndSet() delegate 를 이용하고 있습니다. 이는 구체적으로 현재의 value 와 인자로 주어지는 expectedValue 를 비교해서, 만약 달랐다면 중간에 다른 스레드에서 값을 변경했음을 인지하고 계산을 철회한 뒤 재실행을 트리거함으로써 동작합니다. 결과적으로 Blocking 없이, 동기화를 언어적 수준에서 지원할 수 있는 방법인것이죠.
CAS 는 병렬 실행을 유지하면서 즉, 성능을 높이면서 동기화를 해줄 수 있는 좋은 방법이지만, 여러가지 문제가 발생할 수 있습니다. 이에 대한 대표적 문제가 ABA 문제 입니다.
CAS 의 문제점
ABA 문제는 스택과 같은 자료구조에서 A->B->A 순서로 데이터를 쌓고, A 와 B를 POP 한 뒤에, 다시 A 를 PUSH 한 경우 스택 포인터(SP)가 가르키는 A 는 이전과 같으므로 스택에 변화가 없었다고 판단하면서 발생하는 동시성 문제 입니다.
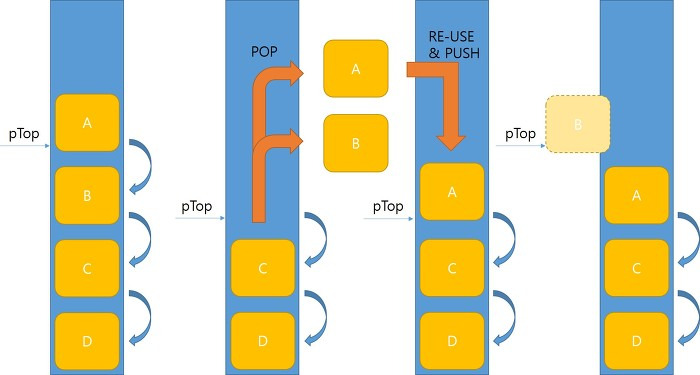
첫번째 스레드가 A 를 POP 하기 위해 current 로, B 를 next 로 설정한 상태에서, 중간에 두번째 스레드가 끼어들어 A와 B를 POP 합니다. 이후 세번째 스레드가 A 를 PUSH 하면, 첫번째 스레드 입장에서는 정상적으로 POP 하려는 A가 존재하므로 문제가 없어 작업을 실행합니다. 하지만 next 로 설정되어 있지만 지금은 존재하지 않는 B 를 current 로 변경하고 있는 문제가 발생하게 됩니다. 이 상황은 궁극적으로 단순히 데이터의 읽기 및 쓰기에 대해서는 원자적으로 실행되지만, 그 보다 더 큰 범위내에서의 원자적 접근이 필요한 경우에 발생할 수 있는 문제 입니다.
또 이것을 해결하기 위해 주소값 뿐만아니라 POP 대상에 대해서도 저장하는 Double-CAS 를 이용할 수도 있습니다. 물론, 이는 근본적 문제를 해결하기 보다는 특정 사례를 해결하는 방법입니다.
메모리 재배치를 막음으로써 발생하는 문제
특정 변수의 읽기와 수정만 원자적으로 처리하는 Atomic 의 경우 Google 의 Abseil 팀이 작성한 문서 에 따르면, 메모리 재배치 문제로 인해 미묘한 버그가 발생할 수 있음을 경고하고 있습니다. 이는 어셈블리 수준에서 memory_order_seq_cst과 같은 엄격한 메모리 접근 순서를 부여하는 명령어가 아닌 memory_order_relaxed 명령어를 사용할 경우 메모리 재배치 가 일어나면서 발생하는 문제 입니다. 그렇기 때문에 atmoic 의 기본 플래그는 memory_order_seq_cst 이며, 가시성 문제가 발생하지 않는 경우에만 memory_order_relaxed 를 사용해야 합니다. 그렇다면 memory_order_seq_cst 를 잘 사용하기만 하면 되는 것 아닌가? 라고 생각할 수 있습니다.
추가로 문서에서 강조하는 점은 x86 과 달리 ARM CPU 아키텍처에서는 memory_order_seq_cst과 같은 엄격한 메모리 접근 순서를 부여해야 하는 명령어를 만들기 위해서 특별히 memory fense 관련 명령어를 추가해야 하는 오버헤드가 발생하기 때문에 오히려 synchronized{} 를 이용하는 것 보다 느리다고 언급합니다. 특히, 안드로이드 처럼 ARM CPU 를 사용하는 환경에서 이 문제가 가시화됩니다.(최근의 ARMv8.1 에서는 CAS 및 LAA 연산에 대해 원자적으로 수행하는 명령어를 지원하는 LSE(Large System Extension) 으로 최적화하여 성능을 개선하고 있다고 언급되고도 있습니다.) 왜냐하면 java/kotlin 의 Atmoic 내부의 value 필드에 작성된 Volatile 키워드가 메모리 재배치를 막기 때문입니다.
Volatile
Volatile 은 앞서 설명한 바와 같이 캐시 메모리들이 메인 메모리로 부터 읽어서 복사해 둔 각각의 복사본들의 일관성을 보장해 주는 Cache coherence(캐시 일관성) 을 활용한 Visibility guarantee 와 메모리 재배치를 막는 Happends-Before guarantee 를 보장함으로써 가시성 문제를 해결해주는 동기화 매커니즘 입니다.
구체적으로 A,B 두 스레드가 존재하고, 순차적으로 A 스레드는 Volatile 변수에 쓰기 연산을, B 스레드는 읽기 연산을 수행하는 상황속에서 Visibility guarantee 는 다음 목적을 실현합니다.
- A 스레드가
Volatile변수에 쓰기 연산을 수행하기 전에 발생한 일반 변수들의 읽기와 쓰기에 대한 SideEffect 들이 B 스레드가Volatile변수에 읽기 연산을 수행한 이후에, 관찰 가능해 집니다. - 한 스레드가
Volatile변수에 읽기 연산을 수행하는 시점에 해당 스레드에 보여지고 있던 공유 변수들이 최신화 됩니다.(SideEffect 들이 관찰 가능해 집니다.)
위 규칙들이 조금 낯설게 느껴질 수 있습니다. 구체적인 예시를 토대로 좀 더 세부적으로 살펴보겠습니다.
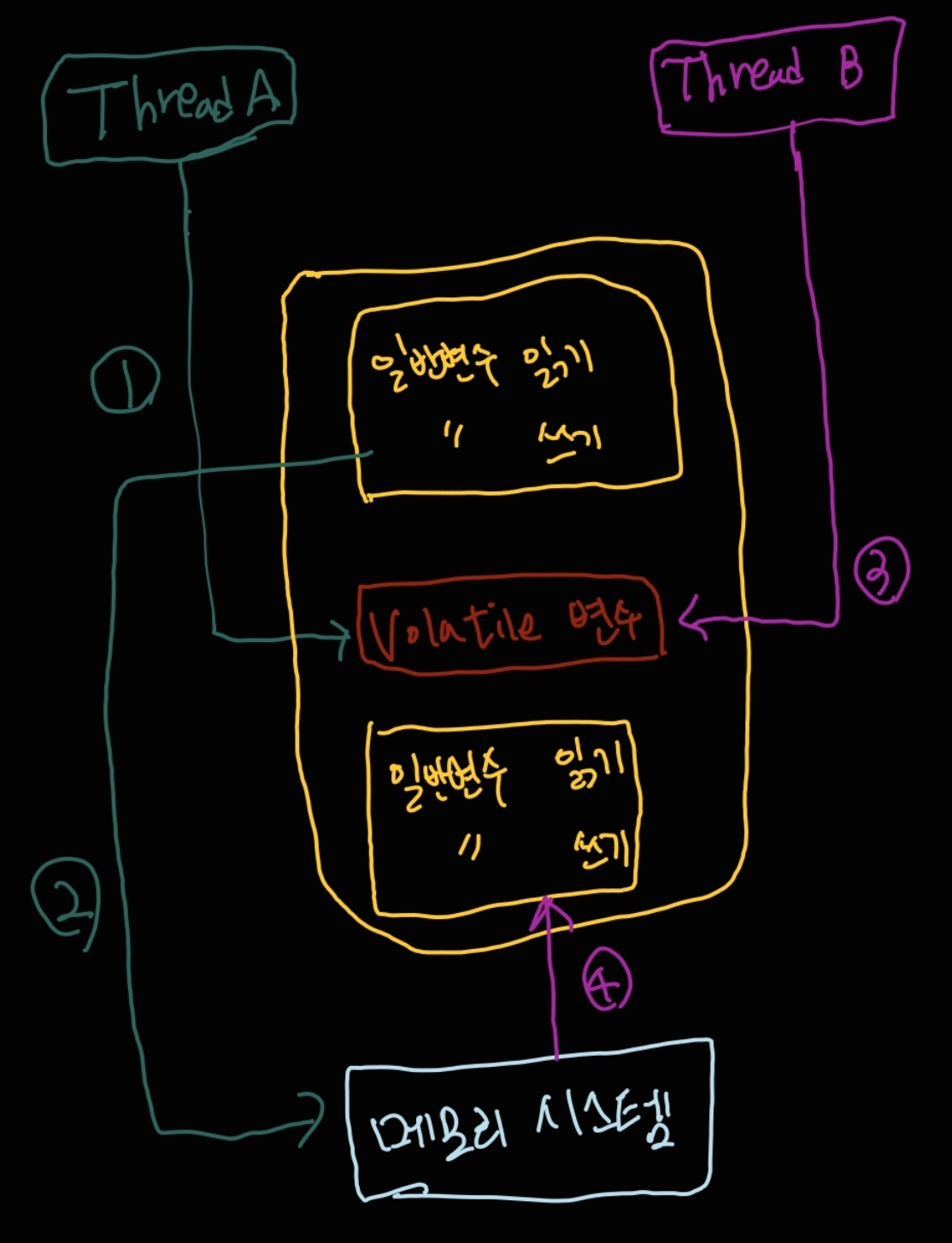
그림에서 초록색은 스레드 A 의 동작이고, 핑크색은 스레드 B 의 동작입니다. 적혀진 숫자 번호 순서대로 동작하게 됩니다.
- Thread A 가
Volatile변수에 쓰기를 수행합니다. Volatile변수 이전에 있었던 일반 변수의 읽기, 쓰기들의 결과(SideEffect)가 Cache coherence 로 인해 같은 값을 읽는 캐시 메모리들로 전파됩니다.- Thread B 가
Volatile변수에 읽기를 수행합니다. Volatile변수 이후에 일반 공유 변수들이 최신화 됩니다.(SideEffect 들이 관찰 가능해 집니다.)
이러한 동작들은 Jakob Jenkov의 Java Volatile Keyword 에 따르면 마치, 메인 메모리로 부터 항상 최신의 값을 읽고, 쓰는 것 처럼 동작한다고 합니다.(물론 실제로 그렇게 동작하는 것은 아닙니다. 메인 메모리로 부터 항상 새로 읽어 들이는 것은 심각한 병목 현상의 원인이 되겠죠.)
위의 동작만으로 가시성 문제를 해결할 수 있다고 생각하시겠지만, 실제로는 그렇지 않습니다. 참조 지역성의 원리가 CPU 레지스터에서 읽어들인 기존의 값을 재사용 할 수 있는 경우에 캐시로 부터 다시 읽지 않고, 이를 재사용할 수 있습니다.
또한, Java/Kotlin 의 경우 바이트코드 수준에서 명령어들에 대해 일부 성능 최적화를 목적으로 메모리 재배치가 발생할 수 있는데, 이것이 Visibility guarantee 를 보장시키지 못하는 문제를 야기합니다. 앞서 설명한 바와 같이 변수 선언 및 초기화 표현식의 순서가 달라지면서, Volatile 이전에 일반 변수에 대해 읽거나 쓰기 연산을 했던 명령어들이 Volatile 변수 쓰기 연산 이후로 가거나, 또는 Volatile 변수 읽기 이후에 발생해야 할 일반 변수에 대한 읽기, 쓰기 연산이 Volatile 이전으로 재배치를 야기할 수 있습니다. 이런 경우 정반대의 의도되지 않은 동작이 수행될 수 있기 때문에 Java 에서는 앞서 설명한 바와 같이 메모리 재배치를 막는 Memory fense 명령어들을 추가로 생성합니다.
data = 100
flag = true // volatile
----------------------- // 위 순서가 아래처럼 될 수 있습니다.
flag = true // volatile
data = 100
메모리 재배치를 막기 위해 Volatile 은 별도로 Happens-Before guarantee 라는 다음의 규칙을 만족하는 것을 보장합니다.
Volatile변수에 대한 쓰기 연산 이전에 위치하는 일반 변수들의 읽기, 쓰기 명령어들은Volatile변수의 쓰기 연산 이전에 반드시 실행됨을 보장(happens-before guarantee) 합니다. 하지만, 이후에 위치하는 일반 변수들의 쓰기 및 읽기 명령어들은 어떤 경우에도 보장되지 않습니다.(앞에 올수도 있고, 뒤에 올수도 있습니다.)Volatile변수에 대한 읽기 연산 이후에 위치하는 일반 변수들의 읽기 및 쓰기 명령어들은Volatile변수의 읽기 연산 이후에 반드시 실행됨을 보장합니다. 마찬가지로 이전에 위치하는 일반 변수들의 읽기 및 쓰기 명령어들은 어떤 경우에도 보장되지 않습니다.(앞에 올수도 있고, 뒤에 올수도 있습니다.)
위 두가지 Happens-Before guarantee 와 Visibility guarantee 규칙을 보장하는 Volatile 을 통해 Java 에서 가시성 문제를 해결할 수는 있습니다. 다만, 앞선 예시에서도 설명한 바와 같이 스레드들이 공유 자원에 대해 순차적으로 읽기, 쓰기 연산을 하는 경우에만 각 스레드의 상태가 관찰 되어질 수 있도록 만들기 때문에 가능합니다. 이와 달리, Race condition 으로 인해 발생하는 문제는 Volatile 을 이용하는 Atomic 또는 임계 영역 진입 전에 다른 스레드의 공유 자원을 관찰할 수 있는 synchronized{} 과 같이 Blocking or Non-Blocking 동기화 매커니즘을 이용해야만 합니다. 다시한번 강조하지만 Volatile 만으로는 Race Condition 을 해결하기 위해서는 가시성 보장과 원자적 연산을 동시에 만족해야만 합니다.
안드로이드 에서의 Atomic vs Synchronized
결과적으로, ARM 아키텍처 기반의 ABI 를 타겟하는 안드로이드와 같은 상황에서 Atomic 을 사용하는 경우 메모리 재배치가 일어나지 않도록 memory fense 를 추가하게 되기 때문에 어느 정도 성능 오버헤드를 동반하게 됩니다. 만약, 공유 변수가 여러개이고 각각의 변수를 모두 Atomic 으로 생성한다면 오버헤드가 가중될 수 있습니다.
따라서, ‘Atomic 은 Non-Blocking 이니까 더 빠르지 않을까? 그냥 이거만 사용하면 되겠네?’ 라고 생각하면 오판이 될 수 있습니다. 그러니 이러한 상황에서 Atomic 변수를 생성하고, 유지 관리하는데 비용이 많이 들기 때문에(구현의 어려움), 가능한 이미 만들어진 thread-safe 클래스 들을 활용하거나(Best Choice), 그냥 synchronized{} 를 이용하는 것을 권장한다고 Abseil 팀은 강조합니다.(ARMv8.1 부터는 최적화된 명령어를 제공하기 때문에 사용 사례에 맞게 써도 되는 것 같습니다..)
댓글남기기